
Autonomous Challenge
Egal ob zu Lande, zu Wasser oder auch in der Luft: An der Entwicklung unbemannter Systeme, die sich autonom fortbewegen und den Mobilitätsmix der Zukunft prägen können, wird vielerorts intensiv geforscht. Wie weit die Technik bereits ist, wurde kürzlich bei der Autonomous Challenge @ CES am Rande der Consumer Electronics Show in Las Vegas deutlich. Bei der inoffiziellen Weltmeisterschaft im autonomen Rennfahren ganz vorne mit dabei war das Team der Technischen Universität München.
Von Jan Schönberg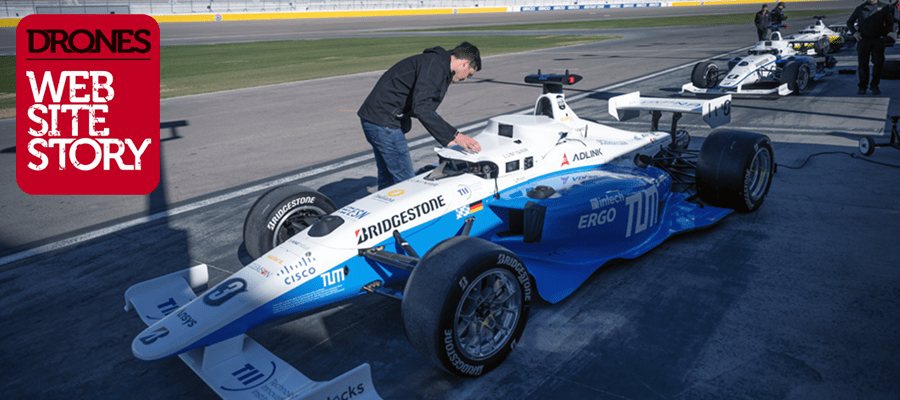
Sich auf einem abgetrennten Parcours oder auch in einem definierten Flugkorridor selbständig fortzubewegen ist das eine. Dort aber auf unvorhergesehene Dinge und andere, ungeplant auftauchende Verkehrsteilnehmer reagieren zu können, das andere. Zumal dann, wenn Situationsanalyse, Risikoabwägung und Handlungsimpuls bei hohen Geschwindigkeiten und damit in Sekundenbruchteilen erfolgen müssen. So wie im Bereich des autonomen Rennsports. Bei Topspeed-Werten bis zu 300 Kilometer pro Stunde werden die Detektions- und Steuerungskomponenten extrem gefordert. Zumal dann, wenn sich mehrere autonome Boliden auf der Strecke befinden. An dieser Stelle weltweit ganz vorne mit dabei ist die Projektgruppe TUM Autonomous Motorsport. Nach dem Erfolg bei der Indy Autonomous Challenge auf dem Indianapolis Motor Speedway im vergangenen Oktober reichte es für die Forschungsgruppe von der Technischen Universität München beim Folgewettbewerb in Las Vegas am vergangenen Freitag zu einem hervorragenden zweiten Platz im Feld der fünf Forschungsgruppen aus aller Welt. Das Besondere an der Autonomous Challenge @ CES: Anders als in Indianapolis traten bei dem Rennen am Rande der Consumer Electronics Show in Las Vegas jeweils zwei autonome Rennwagen im direkten Duell gegeneinander an.
Prognosen
„Die Anforderungen, die bei der Indy Autonomous Challenge an ein Fahrzeug gestellt werden, sind enorm“, erklärt Alexander Wischnewski, Teammanager bei TUM Autonomous Motorsport. „Anders als im normalen Straßenverkehr gibt es so gut wie keine Regeln, das Verhalten der anderen Fahrzeuge ist daher schwer vorhersehbar. Bei Geschwindigkeiten von bis zu 300 Kilometern pro Stunde muss die Software extrem schnell auf Veränderungen reagieren.“ Der Bordcomputer erfasst und analysiert dabei in Sekundenbruchteilen alle Informationen, die Kameras, LiDAR-Sensoren, GPS-Empfänger und Radarsensoren liefern. Mithilfe der Daten werden Prognosen darüber erstellt, wohin sich die anderen Fahrzeuge bewegen, um Entscheidungen zu treffen, die als Fahrbefehle an Lenkung oder Bremsen gegeben werden.
„Wir können im Rennen die schnelle Reaktion eines autonomen Fahrzeugs auf unvorhergesehene Ereignisse bei hohen Geschwindigkeiten testen und optimieren. Diese Erfahrungen bringen uns bei der Entwicklung sicherer autonomer Fahrzeuge im Straßenverkehr einen großen Schritt weiter“, erläutert Wischnewski. Ein weiterer wichtiger Aspekt: „Forschungsprojekte konzentrieren sich oft auf wenige konkrete Fragestellungen. Wir haben die Chance zu sehen, welche Probleme sich ergeben, wenn man das komplette System betrachtet.“
Im Grenzbereich
Am vergangenen Freitag liefert sich jeweils zwei autonom fahrende Rennwagen ein direktes Rennduell über mehrere Runden auf dem Las Vegas Motor Speedway. Dementsprechend waren zahlreiche Überholmanöver und potentiell riskante Interaktionen mit anderen Autos zu sehen. Das Team TUM Autonomous Motorsport meisterte die Duelle anfänglich ohne Probleme. Erst in der finalen Runde gegen das Team PoliMOVE aus Mailand kam das Fahrzeug an seine Grenzen. „Zunächst haben wir uns an das gegnerische Fahrzeug rangetatstet und sind kontrollierte Überholmanöver gefahren. Dann haben wir die Geschwindigkeit Stück für Stück erhöht. Beim Zusammenspiel aus Wahrnehmung, Bewegungsplanung und Regelung kam es dadurch dann allerdings zu kleineren Problemen, die in Summe zur Überschreitung des Limits geführt und das Fahrzeug dann letztlich aus der Bahn gebracht haben“, weiß Phillip Karle vom Lehrstuhl für Fahrzeugtechnik an der TU München, der gemeinsam mit Alexander Wischnewski die TUM Autonomous Motorsport koordiniert. „Man muss aber sagen, dass wir das erste Mal bei so hoher Geschwindigkeit gegen ein anderes Rennfahrzeug gefahren sind und bewusst die Grenzen austesten wollen.” Wodurch und wann genau das Fahrzeug dann schlussendlich an sein Limit kam, muss jetzt noch analysiert werden.
Für seine Platzierung erhielt das bayerische Team ein Preisgeld von 50.000 US-Dollar. Doch das Geld ist für die Wissenschaftler nicht das Wichtigste: „Wir wollen jetzt die Technologie auf die Straße bringen“, sagt Prof. Markus Lienkamp, Inhaber des Lehrstuhls für Fahrzeugtechnik. Und dafür sollen die Erkenntnisse des autonomen Rennsports die Basis sein. „Dazu stellen wir unsere Forschungsarbeiten Open Source zur Verfügung. Parallel dazu haben wir mit den ehemaligen Doktoranden um Alexander Wischnewski die Software-Firma driveblocks gegründet, die sich um die Serienumsetzung kümmert.“
Erkenntnisse für die Zukunft
Inwiefern autonome Systeme von den konkreten Erkenntnissen, die im Rahmen der von der Non-Profit-Organisation Energy Systems Network ausgerichteten Autonomous Challenge gewonnen wurden, künftig profitieren können, wird die Zukunft zeigen. Doch klar ist, dass Wettbewerbe wie dieser zu wichtigen Erkenntnissen führen können. Erkenntnissen, die die Zukunft der autonomen Fortbewegung zu Lande, zu Wasser und in der Luft nachhaltig beeinflussen können.
Foto: Jacob Kepler / TUM
Drones Monthly
In einem monatliche Newsletter wirft die Redaktion des Magazins für die Drone-Economy ein Schlaglicht auf aktuelle Geschehnisse in der World of Drones. Also am besten jetzt gleich hier klicken und kostenfrei Drones Monthly abonnieren.





