
Field Robot Event: Agrardrohnen im Wettstreit
Die Landwirtschaft – Stichwort: Precision Farming – ist ein wichtiger Zielmarkt für die internationale Drone-Economy. Neben unbemannten Flugsystemen bietet er auch für automatisiert oder sogar autonom agierende Fahrzeuge jede Menge Einsatzpotenziale. Im Rahmen der von der Deutschen Landwirtschafts-Gesellschaft (DLG) ausgerichteten Feldtage trafen sich Vertreterinnen und Vertreter verschiedener internationaler Forschungseinrichtungen in Mannheim, um sich über entsprechende Technologien auszutauschen – und die jeweils entwickelten Agrarroboter beim Field Robot Event gegeneinander antreten zu lassen.
Von Jan Schönberg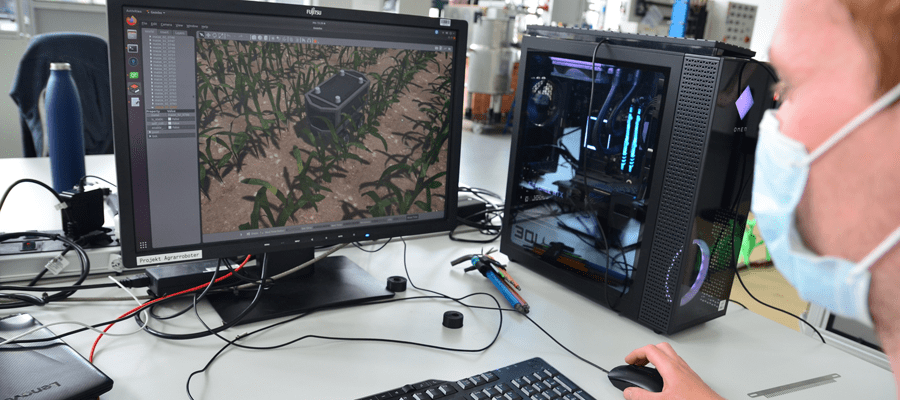
Das International Field Robot Event wurde 2003 von der niederländischen Universität Wageningen aus der Taufe gehoben. Dabei treten Studierende aus der ganzen Welt mit ihren selbst entwickelten Feldrobotern gegeneinander an. Nach zweijähriger Corona-Zwangspause fand der Wettbewerb in diesem Jahr erstmals wieder in Präsenz statt und insgesamt zwölf Teams aus Deutschland, Italien, Slowenien und den Niederlanden traten mit ihren Konstruktionen in verschiedenen Disziplinen gegeneinander an.

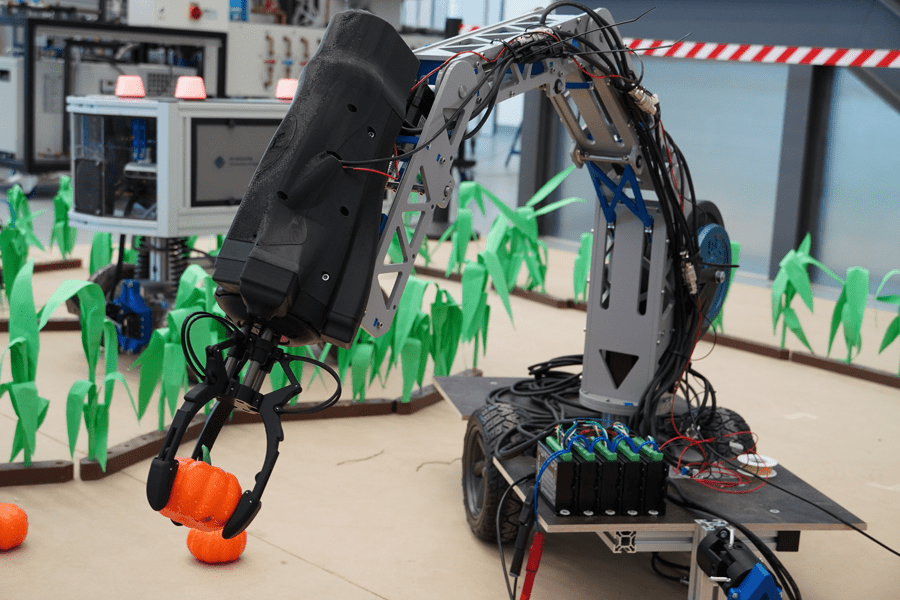
Mit dem Agrarroboter CERES II nahm ein Studierenden-Team der FH Münster erfolgreich am Field Robot Event in Mannheim teil
Dabei mussten auf einem Versuchsfeld mit Maispflanzen verschiedene Aufgaben mit den Schwerpunkten Navigation und Applikation bewältigt werden. Der Wettbewerb wurde dabei sowohl auf einer echten Ackerfläche als auch virtuell mit Hilfe des 3D-Robotik-Simulators ROS/Gazebo durchgeführt. Dabei mussten die Roboter beziehungsweise ihre digitalen Ebenbilder zum Beispiel eigenständig nach vorgegebenen Mustern durch die Reihen der Felder fahren, ohne die Pflanzen dabei zu beschädigen. Beim „Sensing and Mapping“ wiederum mussten auf dem Feld Löwenzahnpflanzen und Blechdosen erkannt, voneinander unterschieden und anschließend auf einer Karte markiert werden.
Mit Blick auf den wachsenden Markt für Precision Farming-Anwendungen werden verschiedene Technologien für automatisierte und autonom agierende Drohnen entwickelt
Erfolgreich unterwegs war dabei CERES II. Die Agrardrohne des Teams von der FH Münster wurde in den vergangenen beiden Jahren entwickelt und wurde beim Field Robot Event erstmals „in freier Wildbahn“ eingesetzt. „Es war toll, mit dem Roboter endlich loszufahren und zu sehen, dass er funktioniert hat“, freut sich Jannis Wagner vom studentisches Projektteam der FH Münster. „Und es ist super, dass er gleich so gut funktioniert hat.“ In der Tat konnten die CERES-Entwicklerinnen und -Entwickler wirklich zufrieden sein. In der Disziplin „Navigation“ belegte man den ersten Platz auf dem echten Feld und den zweiten auf dem simulierten. Beim „Sensing and Mapping“ gab es zwei hervorragende dritte Plätze zu feiern. Offensichtlich hatten sich die Modifikationen im Vergleich zum Vorgängermodell ausgezahlt. So verfügt CERES II über zwei voneinander unabhängig steuerbare Lenkachsen, an einigen Stellen wurden spezielle Vorrichtungen gegen Verschmutzungen angebracht, damit die Sensoren nicht durch Sand oder Schlamm vom Feld verdreckt werden. Allerdings wurde ersichtlich, dass der Ackerstaub hartnäckiger ist, als die Studierenden dachten. Denn tatsächlich fand der feine Schmutz seinen Weg durch die Plexiglasabdeckungen, sodass man für die nächste Field Robot Event-Auflage im kommenden Jahr im slowenischen Hoče bereits weiteres Optimierungspotenzial ausgemacht hat.
Fotos: FH Münster





