
Geisterschiffe
Die Logistikbranche steht vor der Herausforderung, ökologisch zunehmend nachhaltig zu arbeiten und gleichzeitig einem enormen Kostendruck standzuhalten. Der Fachkräftemangel erschwert die Situation zusätzlich. Doch während viele Augen auf Straßen und Schienen gerichtet werden, geraten Flüsse und Kanäle oft aus dem Blickfeld. Dabei gibt es sogar Kapazitätsreserven in der Binnenschifffahrt. Vor allem, wenn dort in Zukunft automatisiert navigierende Schiffe unterwegs sind.
Von Jan Schönberg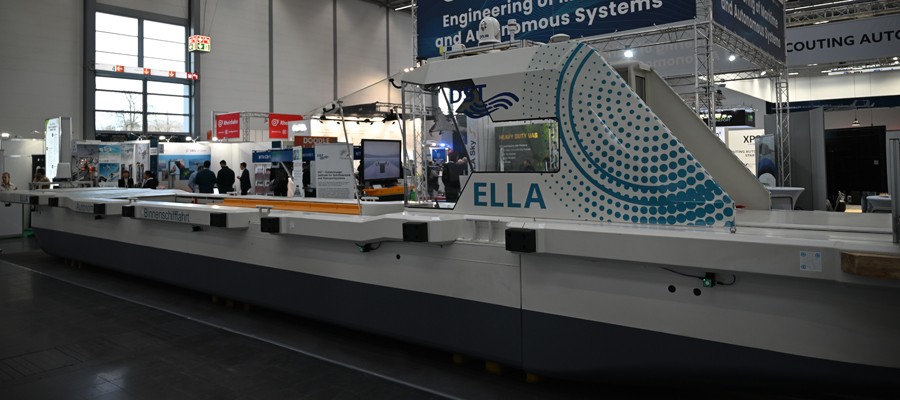
Der Betrieb von Uncrewed Surface Vessel (USV) stellt Operator vor vielfältige Aufgaben. Denn während autonomes oder automatisiertes Navigieren auf offenen Gewässern noch vergleichsweise einfach zu bewerkstelligen ist, sieht das in engen Fahrwassern, Häfen und Schleusen schon ganz anders aus. Je komplexer die Umgebungsbedingungen und je mehr weitere Verkehrsteilnehmende unterwegs sind, desto schwieriger wird es. Zumal die Bandbreite extrem hoch ist und von schwimmenden Menschen über Ruder- und Segelboote bis hin zu Frachtschiffen und Ozeanriesen reicht. Allesamt mit höchst unterschiedlichen Charakteristika, was Manövrierfähigkeit, Bremswege und dergleichen angeht. Dazu kommen noch Umwelteinflüsse wie Wind und Strömung, die ebenfalls in die Bewertung der Gesamtsituation einfließen müssen.
„Mission Impossible“
Was für menschliches Personal auf der Brücke vor allem mit Übung und Routine zu meistern ist, kann für automatisierte Systeme eine „Mission Impossible“ darstellen. Während Vorgaben zur Planung von Schiffskurs und -geschwindigkeit bei Fahrten in ruhigen Kanälen oder Flüssen noch relativ einfach zu beschreiben sind, ist dies bei Manövern in Häfen und an Schleusenanlagen nicht mehr der Fall. Um beispielsweise eine vorgegebene Parkposition anzufahren, ist aus einer Reihe an potenziellen Optionen die effizienteste sowie sicherste auszuwählen. Und die Wahl der besten Strategie hängt von diversen Parametern ab. Beispielsweise vom aktuellen Beladungszustand des Schiffes und den Umgebungsbedingungen wie Wind und Strömung.

<Der Leitstand wurde so konzipiert, dass von dort sowohl manuell navigiert als auch automatisierte Missionen überwacht werden können
In Duisburg, genauer gesagt im DST – Entwicklungszentrum für Schiffstechnik und Transportsysteme, arbeitet ein Team unter Leitung von Dr.-Ing. Rupert Henn daran, technische Lösungen für diese und andere Herausforderungen im Bereich der autonomen Binnenschifffahrt zu entwickeln. Ein zentrales Element dabei hört auf den Namen ELLA: „Entwicklungsplattform im Modellmaßstab für Manöver-Automatisierung“. Dabei handelt es sich im Grunde um ein im Verhältnis 1:6 verkleinertes Binnenschiff. Aufgrund der vorbildgetreuen Nachbildung der Rumpfform sowie der Antriebs- und Manövrierelemente bildet das 15 Meter lange und 1,6 Meter breite Modell das Fahrverhalten eines typischen Frachtmotorschiffs realistisch nach. Dies ermöglicht die Übertragung der Testergebnisse auf die großen Originale.
Lernumgebung
Sowohl das mit einer Vielzahl moderner Sensoren ausgestattete USV als auch das ausgewählte Testfeld beim Schleusenwerk Henrichenburg im Dortmund-Ems-Kanal dienen als Lernumgebung für eine künstliche Intelligenz, die auf Basis manuell gesteuerter Missionen und ihrer eigenen Fahrversuche Schritt für Schritt lernt, die erforderlichen Navigationsmanöver zu planen und durchzuführen. Am Ende der Entwicklung soll das System in der Lage sein, ein vorgegebenes Ziel selbstständig und sicher zu erreichen.
Um die Testmöglichkeiten zu erweitern, werden neben den realen Missionen auch umfangreiche virtuelle „Probefahrten“ an einem speziellen Simulator durchgeführt. So wird sichergestellt, dass die programmierten Algorithmen zur Umfelderkennung und Routenplanung ausreichend unter den unterschiedlichsten Einsatzsbedingungen getestet werden können. Denn herausfordernde Parameter wie verschiedene Regenmengen oder insbesondere auch Nebel können weder geplant noch in der freien Natur simuliert werden.

Dr.-Ing. Frédéric Kracht (links) leitet den Fachbereich Autonomes Fahren am DST, Dr.-Ing. Rupert Henn leitet das ELLA-Projekt (Foto: Messe Düsseldorf)
Versorgungslücken schließen
Die mittel- und langfristige Hoffnung der Projektverantwortlichen am DST und in großen Teilen der Logistikindustrie ist es, dass USVs dabei helfen können, Versorgungslücken zu schließen, Kapazitäten für den individuellen Gütertransport zu schaffen und nicht zuletzt den Personalmangel zu lindern. Denn nicht nur Lkw-Fahrer und Lokführerinnen sind knapp, auch die Schifffahrtsbranche leidet unter einem erheblichen Mangel an (nautischem) Personal. Automatisierte und (teil-)autonome Systeme könnten einen wesentlichen Beitrag zur Entspannung der Situation leisten.
Allerdings ist die tatsächlich vollautonome Binnenschifffahrt sicherlich noch Zukunftsmusik. Doch softwarebasierte Unterstützungssysteme für die Besatzung an Bord könnten dazu beitragen, dass zunächst einmal weniger Fachpersonal benötigt wird. Und der Übergang von ersten teleoperierten zu teleassistierten Systemen liegt ebenfalls in nicht mehr ganz so weiter Ferne. Diese werden fernüberwacht und ihre Steuerung nur in Ausnahmefällen von einem Operator im Kontrollzentrum übernommen. Was in Deutschland bislang nur erprobt wird, ist in Belgien und den Niederlanden bereits aktiv im Einsatz. Und könnte zudem nur ein Zwischenschritt hin zur vollautonomen Binnenschifffahrt sein.





